Robert Brik
Mechanical/Design Engineer
Reactor Rage: Autonomous Response Robot
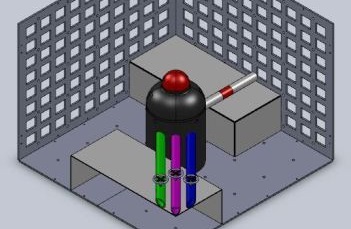
Mock Fukushima Disaster Response Robot
- Objective:
- Autonomously find an access hole and reach into a building.
- Cool down a reactor.
- Rotate a valve to turn a pipe off.
- Move debris to gain access to a pipe and cool it.
- Strategy: Enter autonomously; focus on cooling the reactor and closing the valve.
- Team: Robert Brik (captain), Wes McDougal, Ron Wilcox, Deniz Sevinc, & Becky Vasquez

Mechanical
- Simple four joint design that attaches to an XY-gantry:
- Prismatic joint for lowering into access hole and onto the valve.
- Two revolute joints for reaching the reactor and valve.
- Rotating end effector for turning the valve.
- Feedback via servos and encoder.
- Two cameras to see inside of buidling - one on the gantry and one near the end effector.
- Design Successes:
- Small and lightweight with powerful motors - allowed for fast movement and ability to avoid obstacles.
- Easy to build and modify.
- Repeatable motion.
- Design Drawbacks:
- Requires fairly precise positioning for rotating the valve.
- Due to the combination of multiple servo models, the joints rotated different distances for the same input signal.
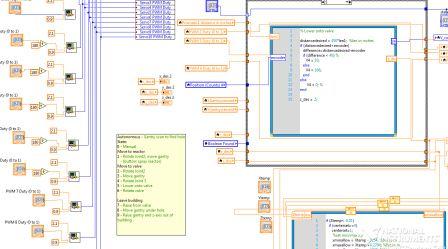
Programming
- Using an edge based identification technique, the robot scanned the arena to search for a corner of the green rectangle and find the access hole.
- Developed a state based control system for controlling the robot to simplify teleoperation mode.
- Created 'Soft Boundaries' to help the robot navigate and avoid the access port walls during teleoperation.
- Design Successes:
- Easy to control.
- Robust and repeatable joint movement.
- Succesful implementation of states allowing the operator to perform discreet tasks in various orders.
- Design Drawbacks:
- Discreet not continuous scanning for access hole.
- Difficulty identifying rectangle if a line is found instead of an edge.
- Limited visibility through cameras.
Robot & Competition